One-Stage Visual Grounding
***** New: Our recent work on One-stage VG is available at ReSC.*****
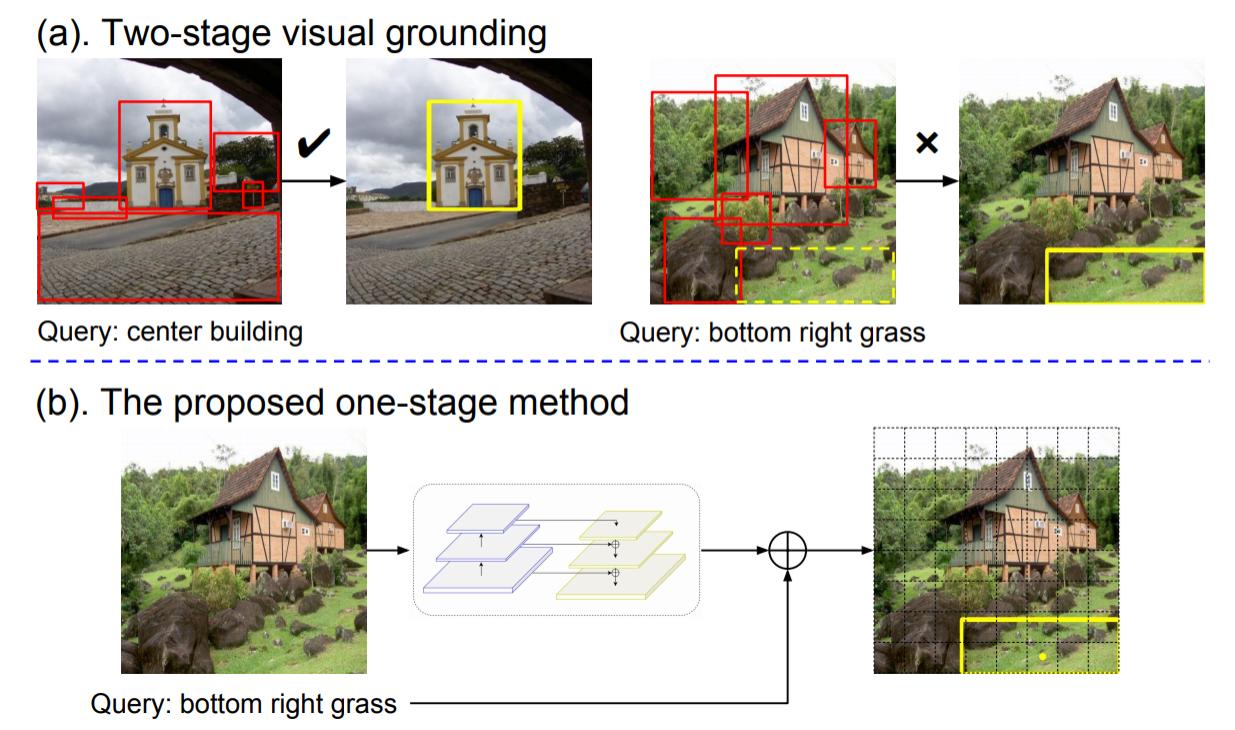
A Fast and Accurate One-Stage Approach to Visual Grounding
by Zhengyuan Yang, Boqing Gong, Liwei Wang, Wenbing Huang, Dong Yu, and Jiebo Luo
IEEE International Conference on Computer Vision (ICCV), 2019, Oral
Introduction
We propose a simple, fast, and accurate one-stage approach to visual grounding. For more details, please refer to our paper.
Citation
@inproceedings{yang2019fast,
title={A Fast and Accurate One-Stage Approach to Visual Grounding},
author={Yang, Zhengyuan and Gong, Boqing and Wang, Liwei and Huang
, Wenbing and Yu, Dong and Luo, Jiebo},
booktitle={ICCV},
year={2019}
}
Prerequisites
- Python 3.5 (3.6 tested)
- Pytorch 0.4.1
- Others (Pytorch-Bert, OpenCV, Matplotlib, scipy, etc.)
Installation
-
Clone the repository
git clone https://github.com/zyang-ur/onestage_grounding.git -
Prepare the submodules and associated data
- RefCOCO & ReferItGame Dataset: place the data or the soft link of dataset folder under
./ln_data/. We follow dataset structure DMS. To accomplish this, thedownload_dataset.shbash script from DMS can be used.bash ln_data/download_data.sh --path ./ln_data
-
Flickr30K Entities Dataset: please download the images for the dataset on the website for the Flickr30K Entities Dataset and the original Flickr30k Dataset. Images should be placed under
./ln_data/Flickr30k/flickr30k_images. -
Data index: download the generated index files and place them as the
./datafolder. Availble at [Gdrive], [One Drive].rm -r data tar xf data.tar -
Model weights: download the pretrained model of Yolov3 and place the file in
./saved_models.sh saved_models/yolov3_weights.sh
More pretrained models are availble in the performance table [Gdrive], [One Drive] and should also be placed in ./saved_models.
Training
-
Train the model, run the code under main folder. Using flag
--lstmto access lstm encoder, Bert is used as the default. Using flag--lightto access the light model.python train_yolo.py --data_root ./ln_data/ --dataset referit \ --gpu gpu_id --batch_size 32 --resume saved_models/lstm_referit_model.pth.tar \ --lr 1e-4 --nb_epoch 100 --lstm -
Evaluate the model, run the code under main folder. Using flag
--testto access test mode.python train_yolo.py --data_root ./ln_data/ --dataset referit \ --gpu gpu_id --resume saved_models/lstm_referit_model.pth.tar \ --lstm --test -
Visulizations. Flag
--save_plotwill save visulizations.
Performance and Pre-trained Models
Please check the detailed experiment settings in our paper.
| Dataset | Ours-LSTM | Performance ([email protected]) | Ours-Bert | Performance ([email protected]) |
|---|---|---|---|---|
| ReferItGame | Gdrive | 58.76 | Gdrive | 59.30 |
| Flickr30K Entities | One Drive | 67.62 | One Drive | 68.69 |
| RefCOCO | val: 73.66 | val: 72.05 | ||
| testA: 75.78 | testA: 74.81 | |||
| testB: 71.32 | testB: 67.59 |
Credits
Part of the code or models are from DMS, MAttNet, Yolov3 and Pytorch-yolov3.

 4 Dec 29, 2021
4 Dec 29, 2021
 4 Sep 10, 2021
4 Sep 10, 2021
 6 Dec 17, 2022
6 Dec 17, 2022
 169 Jun 29, 2022
169 Jun 29, 2022
 1.2k Dec 29, 2022
1.2k Dec 29, 2022
 117 Dec 19, 2022
117 Dec 19, 2022
 57 Nov 14, 2022
57 Nov 14, 2022
 80 Dec 13, 2022
80 Dec 13, 2022
 265 Dec 22, 2022
265 Dec 22, 2022
 1 Jan 06, 2022
1 Jan 06, 2022
 97 Jan 03, 2023
97 Jan 03, 2023
 8 Dec 20, 2022
8 Dec 20, 2022
 8.7k Dec 31, 2022
8.7k Dec 31, 2022
 123 Jan 06, 2023
123 Jan 06, 2023
 99 Dec 23, 2022
99 Dec 23, 2022
 1 Dec 13, 2021
1 Dec 13, 2021
 219 Dec 27, 2022
219 Dec 27, 2022
 2 Feb 26, 2022
2 Feb 26, 2022
 1.9k Jan 07, 2023
1.9k Jan 07, 2023
 34 Dec 08, 2022
34 Dec 08, 2022